论文阅读
DreamWaQ: 纯本体感知的四足鲁棒行走
ICRA 2023 论文 DreamWaQ:用纯本体感知信号配合上下文估计的隐式世界模型,让四足在不依赖视觉的前提下应对突发干扰与未知地形。
核心目标
- 挑战:视觉不可靠: 相机和雷达在烟雾、强光、积雪或高草丛中容易失效。
- 现有方法的局限:
- 纯本体感知方法容易产生状态估计漂移。
- 传统的行为克隆限制了性能上限,且难以应对突发干扰
- 核心理念是 "Implicit Terrain Imagination"(隐式地形想象):虽然我看不到路,但我可以通过脚底的触感和身体的动态,在脑海中“想象”出地形的特征 。
核心创新
- 策略网络的输入中增加线速度这一参数,解决状态漂移的问题;
- 构建CENet网络,估计线速度和环境潜变量编码。
- 使用actor - critic算法训练策略网络。
线速度

- 面对问题:在盲视行走中,机器人仅依赖 本体感知 (Proprioception)(如 IMU 和关节编码器)。虽然 IMU 可以测量加速度,但在长时间运行中,通过积分加速度来推算速度和位置会产生累积误差,这被称为 状态漂移 (Estimation Drift) 。如果没有准确的速度信息,策略网络很难区分“我在稳定行走”和“我在原地打滑”。
- 目标与思路 (Goal): 显式地估计机器人的 身体线速度 (Body Linear Velocity, ),并将其作为一项直接输入喂给策略网络。这样做可以消除累积漂移,显著提高策略的鲁棒性。
- 输入 (Input): 由 CENet 网络估算出的线速度向量
- 过程 (Process): 在策略网络(Actor)的输入层,不仅仅输入关节角度和角速度,还强制拼接了一个由 CENet 实时计算出的线速度向量。
- 公式参考 Eq. (1) 定义的观测 结合了 CENet 的输出:
- 输出 (Output): 一个包含了自身运动速度认知的状态输入,使得策略网络能输出更抗干扰的动作指令 。
CENet
核心目的:联合估计身体状态与环境特征
-
面对问题 (Problem): 传统的做法通常将“状态估计”(我跑多快?)和“环境识别”(地滑不滑?)分开处理。但论文认为这两者是高度耦合的(例如:地滑会导致跑不快),分开估计效率低且不准 。
-
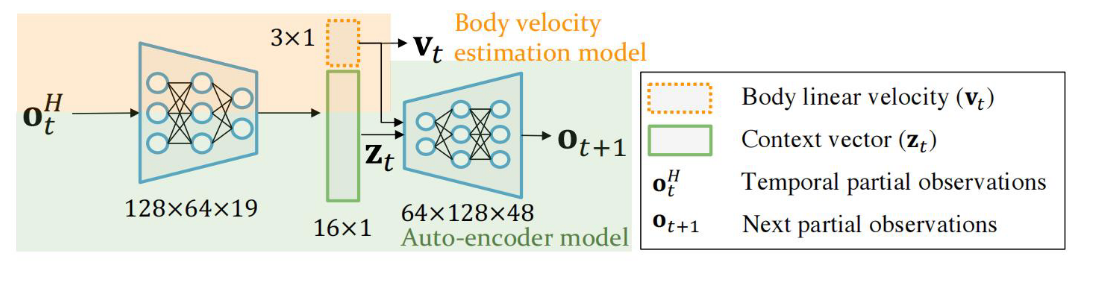
目标与思路 (Goal): 构建一个 上下文辅助估计网络 (CENet)。它是一个共享编码器的多任务网络,利用 自动编码器 (Auto-encoder/VAE) 机制,联合学习 (Jointly Learn) 身体速度和环境潜变量 。
-
输入 (Input):
- 时序部分观测历史 ():即过去 步的本体感知数据(关节信息、IMU数据等。
-
过程 (Process): CENet 包含一个共享编码器和两个分支:
- 分支一(显式估计): 估计身体线速度 。
- 损失函数: ====,即让估计速度尽可能接近仿真器中的真实速度。
- 分支二(隐式想象): 估计环境潜变量 ,并试图重构 下一时刻的观测 ()。
- 逻辑: 如果网络能通过 准确预测下一刻的传感器数据,说明 已经成功捕获了环境的物理特性(如摩擦、硬度)。
- 损失函数: 采用 -VAE 损失,包含重构损失和 KL 散度损失:
- ====
- 总优化目标:====。
- 分支一(显式估计): 估计身体线速度 。
-
输出 (Output):
- (Body Linear Velocity): 显式的速度估计,用于解决漂移。
- (Context Vector): 隐式的环境特征编码,代表了地形的属性(如摩擦系数、地形高度特征)。
Act - Critic 训练方式
核心目的:通过非对称信息差实现隐式地形想象
- 面对问题 (Problem): 机器人是“盲”的(Actor 只有本体感知),但在训练阶段我们需要根据真实地形来判断它走得好不好。如果只用盲视数据训练,机器人很难学会应对复杂地形。
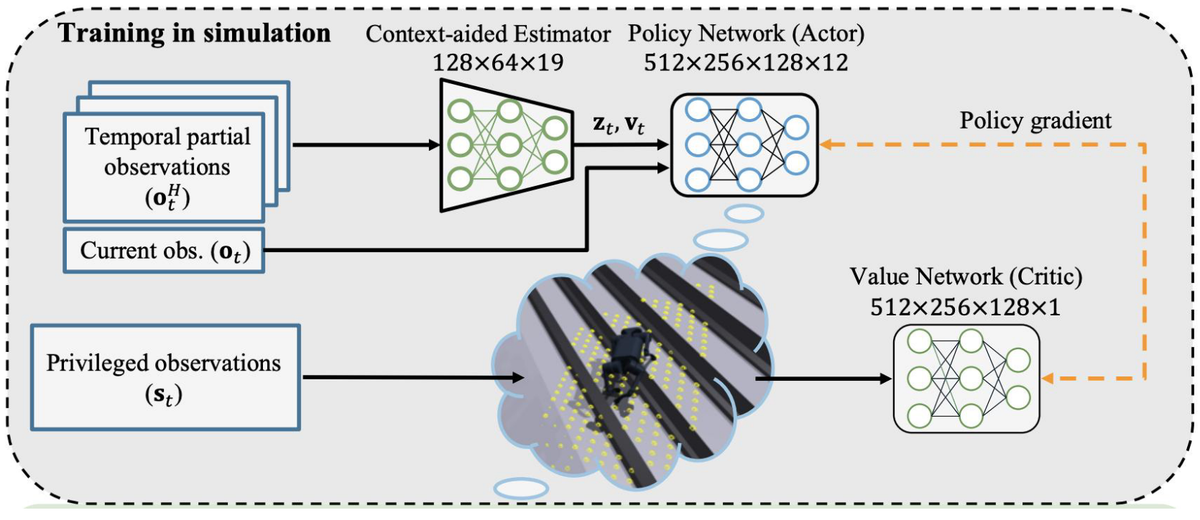
- 目标与思路 (Goal): 采用 非对称 Actor-Critic (Asymmetric Actor-Critic) 架构 。
- Critic (老师): 拥有“上帝视角”,能看到所有特权信息。
- Actor (学生): 只能看到传感器数据和 CENet 的估计。
- 通过 Critic 的指导,强迫 Actor 学会仅凭有限信息推断出最优动作,从而实现 隐式地形想象 (Implicit Terrain Imagination) 。
- 输入 (Input):
- 策略网络 (Actor/Policy): 输入 非特权信息,即 (本体感知), (CENet估计速度), (CENet估计环境) 。
- 价值网络 (Critic/Value): 输入 特权信息 ()。
- 公式参考 :==== 。
- 其中 是地形高度图(Height map,直接看到周围地形), 是外部干扰力。
- 过程 (Process):
- 使用 PPO (Proximal Policy Optimization) 算法进行优化。
- Critic 计算状态价值 ,评估在当前真实地形下,机器人的状态好坏。
- Actor 根据 Critic 反馈的优势函数(Advantage)更新参数,以此来学习如何应对它“看不见”但在 Critic 眼中存在的障碍物(如楼梯)。
- 输出 (Output): 一个鲁棒的 策略网络 (Policy Network)。在实机部署(Zero-shot sim-to-real)时,只需要保留这个 Actor 和 CENet,不再需要 Critic 和特权信息,机器人就能在真实世界中像“看见”了地形一样行走 。
与传统老师学生方法对比
| 对比维度 | 非对称 Actor-Critic (DreamWaQ 采用) | 传统“老师-学生”架构 (RMA 类) |
|---|---|---|
| 核心逻辑 | 名师指路 (探索) | 照猫画虎 (模仿) |
| 训练流程 | 单阶段并发 (One-Stage) 策略和评价网络同时训练,效率高。 | 双阶段串行 (Two-Stage) 先练好老师,再让学生去模仿老师的行为。 |
| 信息来源 | Critic (评价者) 拥有特权信息,给 Actor (学生) 打分。 | Teacher (老师) 拥有特权信息,直接把动作演示给 Student (学生) 看。 |
| 学生能力 | 无上限 学生可能通过探索找到比老师更好的解法。 | 受限于老师 学生的表现很难超过老师 (Behavior Cloning bounds)。 |
| 感知方式 | 隐式想象 为了拿高分,被迫学会“脑补”地形特征。 | 显式回归/模仿 试图逼近老师的动作或环境参数。 |

Written by
ZZC
每天研究怎么摸鱼的神人
Comments
评论功能即将上线