论文阅读
PIE: Proprioception with Imagination for Parkour
PIE 让低成本四足(如 Lite3)仅靠不可靠深度相机就能完成跨沟跳跃、高台攀爬等高难度跑酷动作,核心在于'想象式本体感知'弥补视觉退化时的环境建模。
核心挑战(研究目标)
PIE 旨在解决 低成本四足机器人(如 Deep Robotics Lite3)在仅配备不可靠深度相机的情况下,如何实现高难度的跑酷运动(如跳跃 3倍身长的沟壑、攀爬 3倍身高的台阶) 的问题。
现有的机器人跑酷方法存在以下痛点:
- 感知不可靠: 跑酷需要极其精准的地形感知(特别是在边缘起跳时)。低成本深度相机存在延迟、噪声和视场限制,直接用它来显式重建地形往往不够可靠。
- 训练复杂: 许多现有方法(如 RMA 的某些变体)采用“两阶段”训练(先练老师再练学生),流程繁琐且存在信息损失。
- 性能受限: 为了防止因感知误差导致的摔倒,很多算法会限制机器人的运动能力,导致无法发挥其物理极限(比如不敢跳得太远)。
创新点
双层隐式-显式估计器 (Dual-Level Implicit-Explicit Estimator)
- 面临问题
- 单一感知不可靠: 深度相机有延迟、噪声和盲区(如脚下),直接画地图(显式)容易出错 。
- 盲走上限低: 仅靠本体感知(隐式)无法预判远处障碍(如深沟),无法提前蓄力 。
- 目标
- 双重理解: 同时获取环境的“显式几何形状”(地图)和“隐式物理特性”(未来预测)。
- 鲁棒融合: 通过时序记忆和多模态融合,在视觉失效时能退回本体感知。
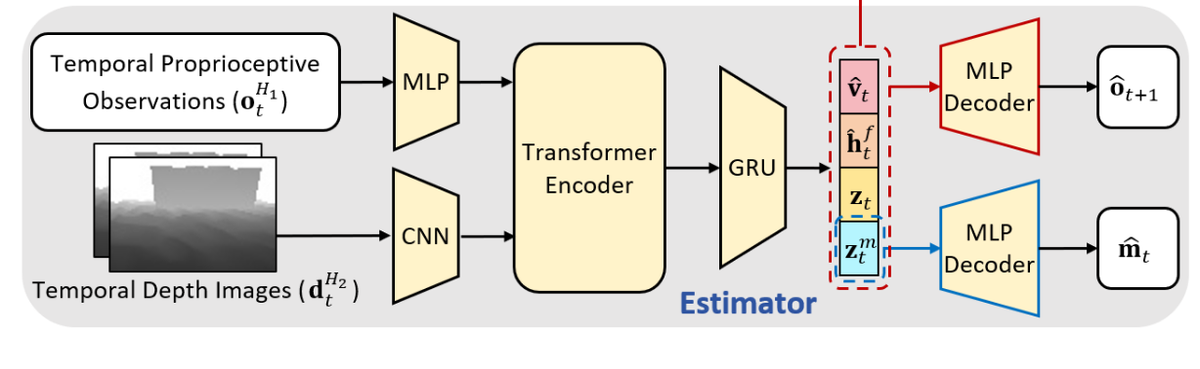
- 输入
- 时序深度图像 ():最近 2 帧的深度图堆叠。
- 时序本体感知 ():最近 10 帧的关节/IMU数据。
- 过程与方程
- 特征融合: 使用 Transformer 融合视觉与触觉特征,再送入 GRU 生成包含记忆的状态编码 。
- 双层估计机制:
- 理解层: 同时重构 地形高度图 (显式看见)和 下一时刻本体状态 (隐式预测未来)。
- 表达层: 同时输出 显式物理量(速度 、足间隙 )和 隐式潜变量()。
- 损失方程:
- 输出 (给 Actor)
- (线速度)、 (足间隙)、 (地形编码)、 (环境潜变量) 。
单阶段非对称训练框架 (One-Stage Asymmetric Framework)
为将两阶段训练范式简化为单阶段,采用了非对称的 actor-critic 架构:
- 面临问题
- 两阶段低效: “先练老师、后练学生”的流程复杂,且学生模仿老师时存在信息损失,性能被老师锁死 。
- 多技能整合难: 很难设计一个奖励函数能同时兼顾跑、跳、爬等多种动作 。
- 目标

Written by
ZZC
每天研究怎么摸鱼的神人
Comments
评论功能即将上线